O’PAVES: An open platform for autonomous vehicle tinkerers
- Track: Embedded, mobile and automotive devroom
- Room: UB2.252A (Lameere)
- Day: Sunday
- Start: 12:00
- End: 12:30
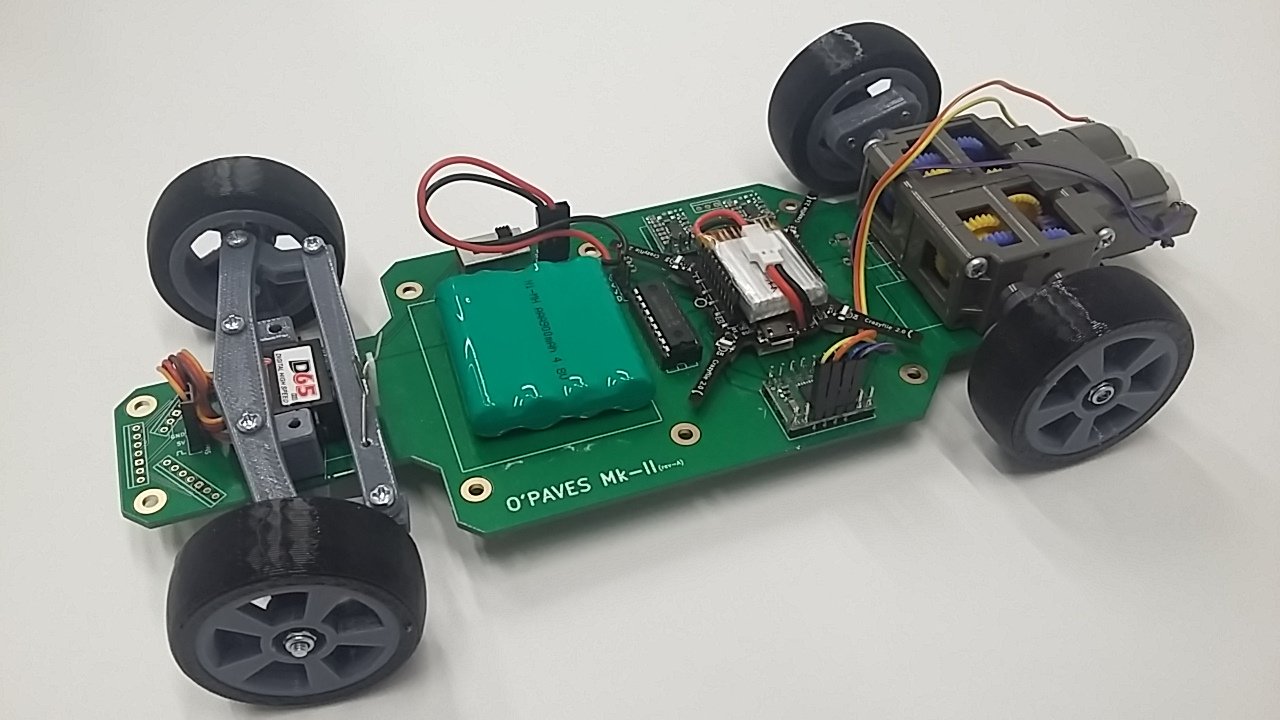
O’PAVES (Open Platform for Autonomous VEhicle Systems) aims at providing an open source and open hardware platform for the prototyping and development of autonomous vehicles. In the current state of the project, what we have is a remote controlled car, but with sensors that you would find on an autonomous vehicle such as IMU and distance sensors. The goal is not necessarily to implement the autonomous feature ourselves, but to allow users to do it by either modify the firmware or add and external computer such as a Raspberry Pi or OpenMV to to add autonomous driving features.
The hardware is open and was designed with FOSS tools such as Kicad and FreeCAD. It’s made of a PCB that act as the frame of the car, 3D printed parts, off the shelf parts from pololu.com (battery, motors, sensors) and and Crazyflie 2.0 nano drone. The drone (without its motors) is connected to the O’PAVES board using an extension port. This solution makes the platform easy to build because most of the very small electronic assembly is already done on the drone. The software is developed in Ada and also only uses FOSS tools like the GNAT compiler or the AdaDriversLibrary. The project is hosted on GitHub: https://github.com/adacore/opaves
In this 25 minutes talk I want to present the state of the project, explain how you can build and hack the platform and show some of the tools and techniques that we used to develop the project. I will bring one of the prototype with me and at least show a video demo if not a live demo.
Speakers
| Fabien Chouteau |
{kind=link}