ROS-Z: A Rust/Zenoh-native stack, fully ROS 2-compliant
- Track: Robotics and Simulation
- Room: UB2.147
- Day: Saturday
- Start: 17:00
- End: 17:25
- Video only: ub2147
- Chat: Join the conversation!
ROS 2 was designed to be independent of its underlying communication middleware — a powerful architectural feature, but one that introduces complexity and overhead.
While working on rmw_zenoh, we kept wondering: What if we streamlined the ROS 2 layers and built a Rust-native stack from Zenoh up to the RCL API? Could it improve performance? Would it be easier to extend? And could we still support existing RCL-C/C++/Python packages through C bindings?
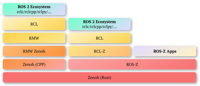
This led us to develop ROS-Z, a Rust/Zenoh-native RCL stack, fully interoperable with ROS 2 via rmw_zenoh. In this talk, we’ll explore our design choices, share performance insights, and highlight the some of the unique features we’ve added to push innovation even further.
Speakers
| Julien Enoch |